This is a new board on FS-4. It’s purpose is to read from the CAN bus and record that data, as well as transmit it over a wireless connection to a base station, which can then relay it to a database hosted on the internet for live viewing by the whole team.
Unlike previous years, the logging telemetry board will not have a microcontroller and will instead be a “hat” which sits upon any SBC with the standard 40 pin header, which must have I2S, I2C, UART0, and SPI0,1 matching the raspberry pi spec. This decision was made because:
- It is difficult to write lots of data to an SD card from a MCU
The software needed for TCP/IP communication and to interface with either the Teledatics or Heltec (or seeed) module only really exists as a linux module…
-
Writing such a big driver is a lot of work
-
Logging using the linux can-utils package has already been tested at norcal, and works well
The board will have the following features:
-
3 can peripherals capable of up to 12 Mbps
-
Audio codec to run driver audio comms
-
Robust automotive 12v power input
-
Alternate M.2-E and PCIe 802.11ah HaLow card support
-
RTC
Current work
See this subfolder, and it’s readme, and it’s schematic pdf
When PCB’s are ordered, a static version of relevant documents will be placed here.
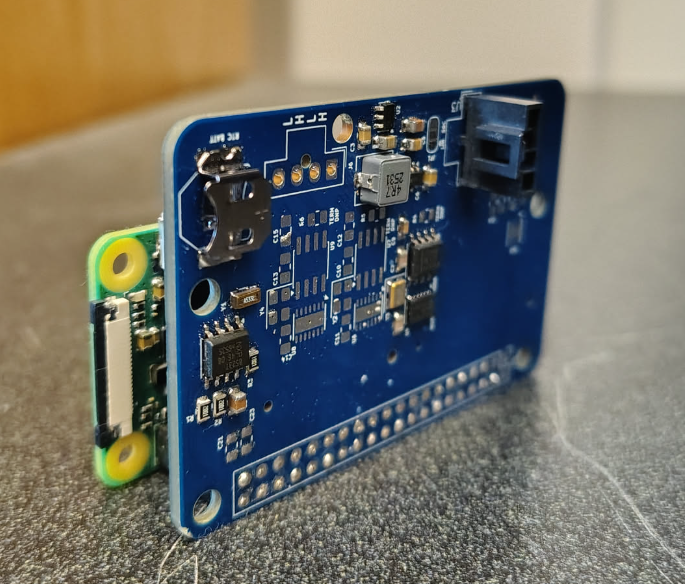
A working prototype

-
It has no radio hardware
-
It has a raspberry pi pico with usb←>uart firmware
-
It has an MCP2515 CAN board, from my car, which I modified to work with 3.3v logic
-
It has connectors to go inline between the main harness and a peripheral board
A “vibes” first try schematic
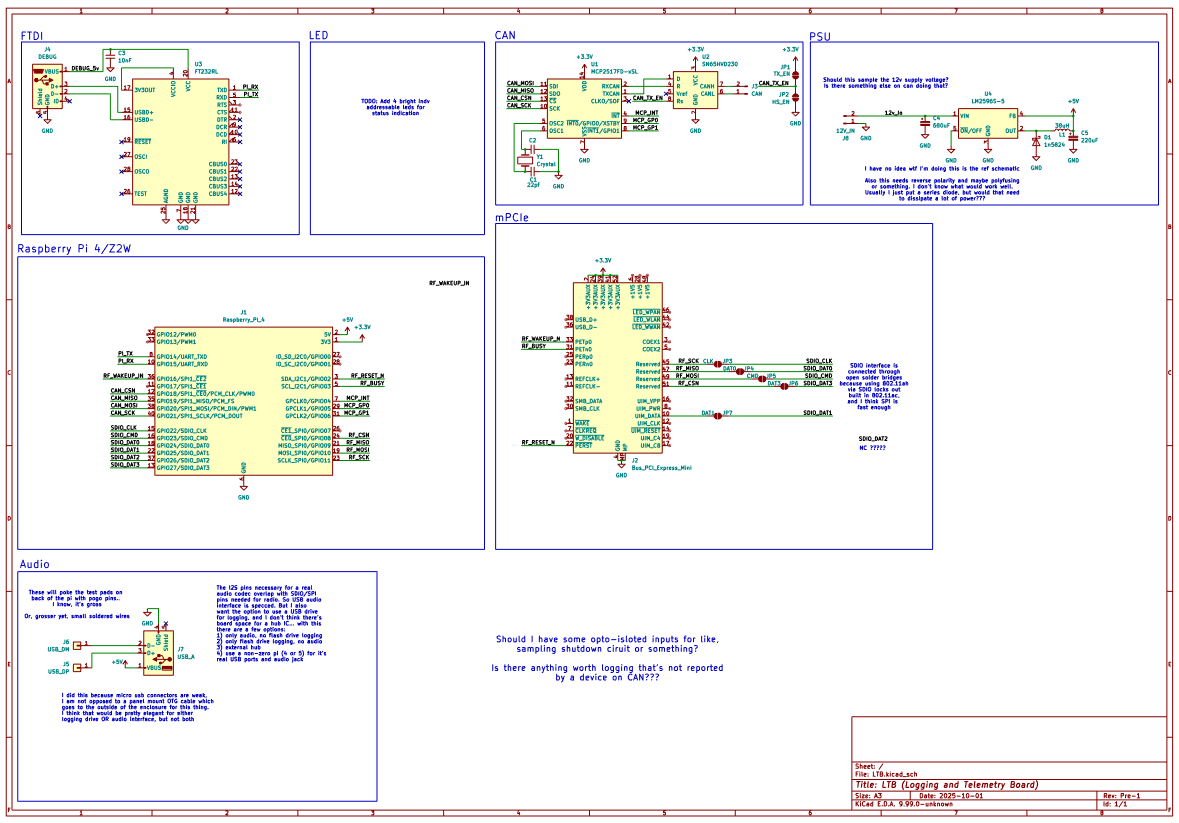
Issues:
-
I made this schematic in kicad nightly, so it needed to be redone
-
It cannot be collaborated on well, because it does not take advantage of hierarchical sheets
-
There’s no architectural support for an alternative module
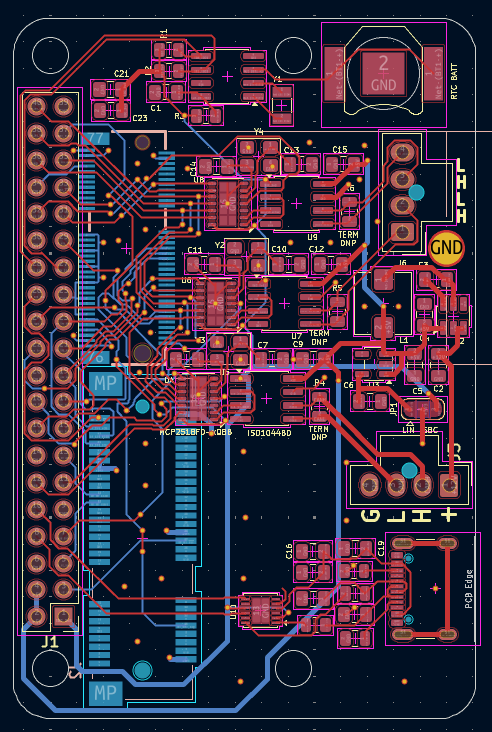
V1 (Fabbed) board
-
Only one CAN channel populated (of 3)
-
Wrong size pin headers.. needed to be soldered partially inserted
Software Bringup
FTDI chip was out of stock, so configured USB-OTG Serial…
-
dtoverlay=dwc2→/boot/config.txt -
modules-load=dwc2,g_serialafterrootwaitin/boot/cmdline.txt -
ln -s root/lib/systemd/system/getty@.service root/etc/systemd/system/getty.target.wants/getty@ttyGS0.service -
echo pi:$(echo 'mysecretpassword' | openssl passwd -6 -stdin) > bootfs/userconf.txt
Wireless to eduroam using nmtui
-
Set device up using
sudo ip link set wlan0 up -
Set device up in
nmtui->radio -
Configure network using “add connection”
Setup the RTC
-
dtoverlay=i2c-rtc,pcf8523→/boot/config.txt -
timedatectl statusto confirm functionality
CAN
-
sudo apt-get install can-utils
-
Into
boot/config.txt:
dtparam=spi=on
dtoverlay=spi1-1cs
dtoverlay=spi1-1csdtoverlay=mcp251xfd,spi1-0,interrupt=26,oscillator=20000000
sudo ip link set can0 type can bitrate 500000