See also Vectors
Augmented Matrix: A matrix where each row is an equation, and each column is the coefficients for a particular variable in each equation. For example:
Gaussian Elimination: Using elementary row operations to put a matrix in echelon form
Gauss-Jordan Elimination: Using elementary row operations to put a matrix in reduced echelon form
Reduced Echelon Matrix: A matrix is in reduced row echelon form (also called row canonical form) if it satisfies the following conditions:
-
It is in row echelon form.
-
The leading entry in each nonzero row is 1 (called a leading one).
-
Each column containing a leading 1 has zeros in all its other entries.
Steps:
-
Make 1
-
Make everything below zero
-
Repeat with
Free Variable: A variable that can’t be eliminated or constrained. Happens when you have more variables than equations.
LU Decomposition: use elementary row operations to create a lower and upper triangular matrix which together are equivalent to a coefficient matrix
Rank: A way of describing the dimensionality of the output of a transformation. If a transformation outputs a line, the rank is 1, an area: rank 2, and a volume: rank 3. Number of linearly independent columns, or rows, whichever the matrix has fewer of.
Column Space: The range of all possible outputs of a transformation. Equal to the span of the columns of the matrix, if they are treated as vectors.
**Column Space Basis:**
The columns from the original matrix which have pivots in the REF of that matrix
Row Space Basis:
REF the matrix and pick out the non-zero rows (From the original Matrix (At least in mcmillan))
Nullitity: Columns - Rank
Null Space / Kernel: The set of all inputs to the linear transformation who’s output is the origin.
Null Space Basis: RREF, then write the non zero rows, but with any free variables negative
Cofactor: The determinate of the matrix with the row and column of the mentioned cell removed.
Eigenvector: Becomes a scalar multiple of itself when a given operator is applied to it. Find from eigenvalue using equation
See also, [[School/Linear Algebra/Work/6.4 Systems of differential equations#2-find-the-general-solution-for-the-system|example of complex eigenvector]]
Eigenvalue: The amount a particular eigenvector get’s stretched
for 2x2 matricies, where m is the mean of the trace: and p is the determinate
See also, [[School/Linear Algebra/Work/6.4 Systems of differential equations#2-find-the-general-solution-for-the-system|example of complex eigenvalue]]
Diagonalization: Change basis so transformation is a diagonal matrix and becomes light work
-
-
P is change of basis matrix
-
D is new diagonal matrix
-
For a matrix to be diagonolizable, there need to be at least as many eigenvectors as there are rows
Change of Basis Matrix: To go from any basis to the standard basis, literally put the basis as a matrix. To go from standard to a different basis, write the new basis as a matrix, and calculate it’s inverse. To go between two basis, get the product of the inverse of the second basis X the first basis.
If they aren’t square you do this shit:
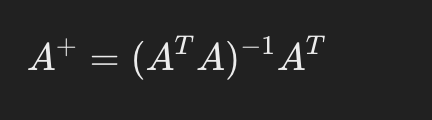

Inverses
When determinate is not equal to zero:
If the determinate is zero, there is no inverse.
Elementary Row Operations
Equivalent to operations on systems
Interchange Equations: Swap two rows
Multiply an Equation by a Constant: Multiply one row by a constant.. Ex:
Add a multiple of one equation to another:
Ex: Row 2 + 2* Row 3 Row 2
Application/Problem Types
Wire Temperature
-
Make an equation for each node, temp = average of all connected nodes
-
solve for constant
-
Put into matrix
-
RREF
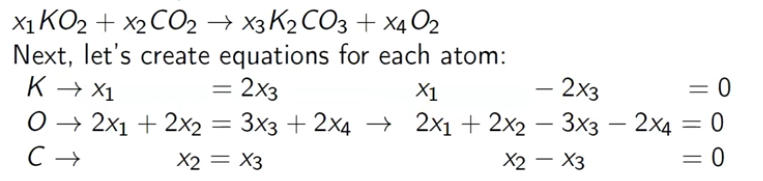
Balance the Chemical Equation
Traffic Management:
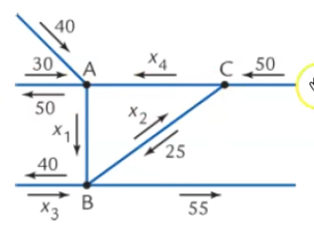
- Write an equation for each intersection (A,B,C) where one side is the sum of all the input and the other is the side of all the output
A:
-
Solve equations for the constant
-
RREF
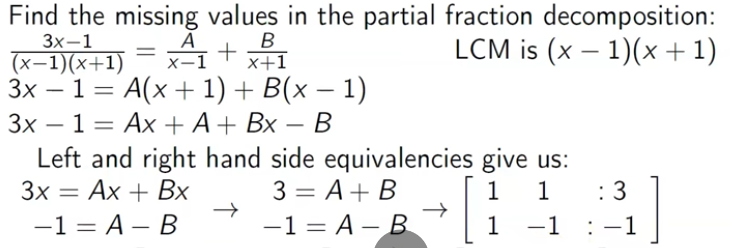
Find the missing values in the partial fraction decomposition
-
Generate a single, distributed equation
-
Separate each “set of coefficients” (here it’s constants and coefficients of x, but it could be powers of x or different variables (I think))
-
RREF
Transformations
one-to-one: if A has linearly independent columns (no free vars)
onto: if A spans all of
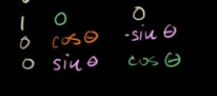
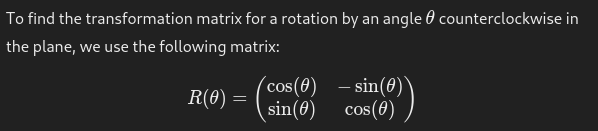
Counterclockwise R^3 about the x axis
Composition of Transformations
Matrices aren’t associative so you have to do it the right way around
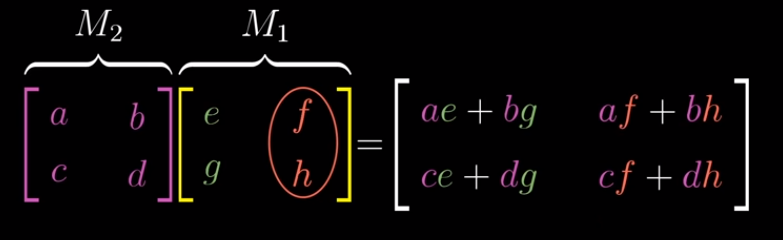
Matrix Multiplication
undefined when number of columns of first matrix don’t match number of rows of second matrix
print("[a b] [e f]\n[c d] [g h]")
a = int(input("a: "))
b = int(input("b: "))
c = int(input("c: "))
d = int(input("d: "))
e = int(input("e: "))
f = int(input("f: "))
g = int(input("g: "))
h = int(input("h: "))
alpha = (a*e) + (b*g)
beta = (a*f) + (b*h)
carrot = (c*e) + (d*g)
delta = (c*f) + (d*h)
print("[", alpha, " ", beta, "]\n[", carrot, " ", delta, "]")
Transposition (X^T)